| |
DISEÑO, CONSTRUCCIÓN
Y EVALUACIÓN DE UN EQUIPO PARA LA
COSECHA MECANIZADA DE CAFÉ EN COLOMBIA
DESIGN, CONSTRUCTION AND VALUATION OF A
EQUIPMENT FOR HARVESTING COFFEE IN COLOMBIA
|
| |
|
|
|
|
Fernando
Álvarez Mejía
Profesor Titular
Universidad Nacional de Colombia Sede Medellín,
Facultad de Ciencias Agrarias , Departamento de
Ingeniería Agrícola y Alimentos,
Medellín, Colombia.
|
Carlos
Eugenio Oliveros Tascón
Investigador
Principal,
Centro
Nacional de Investigaciones de café,
CENICAFÉ, Sede Planalto Manizalez,Caldas,Colombia.
|
| falvarezme@unal.edu.co
|
carlos.oliveros@cafédecolombia.com |
Juan
Rodrigo Sanz Uribe
Investigador Científico II, Centro Nacional
de Investigaciones de Café – CENICAFÉ.
Manizales, Caldas, Colombia.
|
|
| juanr.sanz@cafedecolombia.com
|
|
RESUMEN
Se diseñó, construyó
y evaluó un equipo para la cosecha mecanizada
de café aplicando vibraciones e impactos al follaje.
La investigación se realizó en tres etapas.
En la primera etapa se diseñó y construyó
la estructura, tipo pórtico, con los equipos
e instrumentos requeridos para generar vibraciones y
medir las vibraciones en diferentes partes de los agitadores
y deformaciones en la estructura en sitios críticos.
En la segunda etapa se obtuvo información del
equipo, sin emplear árboles de café, para
verificar su funcionamiento y hacer los ajustes requeridos.
También se midió la fuerza requerida para
transportarlo en campo, la distribución de las
cargas en cada una de las cuatro ruedas del equipo y
las coordenadas del centro de gravedad. En la tercera
etapa se recolectó café con el equipo
en árboles de segunda cosecha, sembrados a 2,0
m x 0,7 m, un tallo por sitio, en terreno plano. Los
resultados obtenidos en los ensayos realizados indican,
en general, buena respuesta de los diferentes componentes
del equipo: estructura, cepillos oscilantes, sistema
de captura de frutos desprendidos y sistema de tracción.
Se observó facilidad para operar el equipo en
las distancias de siembra utilizadas. Con el equipo
se obtuvo un rendimiento de 129,5 kg/h, se desprendió
el 71,7% de los frutos maduros, con 52,3% de frutos
verdes en la masa cosechada, calidad que no es aceptable
para los estándares colombianos. Se requiere
mayor trabajo de investigación, evaluando diferentes
frecuencias, densidad de varillas oscilatorias, masas
excéntricas de los vibradores, velocidad de avance,
carga y concentración de frutos maduros.
con el equipo en árboles de segunda cosecha,
sembrados a 2,0 m x 0,7 m, un tallo por sitio, en terreno
plano. Los resultados obtenidos en los ensayos realizados
indican, en general, buena respuesta de los diferentes
componentes del equipo: estructura, cepillos oscilantes,
sistema de captura de frutos desprendidos y sistema
de tracción. Se observó facilidad para
operar el equipo en las distancias de siembra utilizadas.
Con el equipo se obtuvo un rendimiento de 129,5 kg/h,
se desprendió el 71,7% de los frutos maduros,
con 52,3% de frutos verdes en la masa cosechada, calidad
que no es aceptable para los estándares colombianos.
Se requiere mayor trabajo de investigación, evaluando
diferentes frecuencias, densidad de varillas oscilatorias,
masas excéntricas de los vibradores, velocidad
de avance, carga y concentración de frutos maduros.
Palabras clave
Cosecha mecanizada, cosecha de café, vibradores
de follaje, café, recolección.
ABSTRACTS
A coffee harvester model, applying vibrations and impacts
to the foliage, was designed, built and tested. The
research was conducted in three stages. In stage 1 it
was designed and built the device, over the row type,
with the equipment and instrumentation required to generate
vibrations, measure vibrations in different parts of
the agitators and deformations in the structure at critical
sites. In the second stage information of equipment
was obtained without using coffee trees, to check its
performance and make the required adjustments as well.
The force required for transporting the equipment in
field, the load distribution on each of the four wheels
that support the equipment and the coordinates of the
center of gravity were also measured. In the third stage
data field were collected in 2nd harvest plants (24
months age), planted at 2,0 mx 0,7 m, one stem by site,
on flat ground. The results obtained indicate, in general,
good response of the different components of the harvester
such as structure, oscillating agitators, fruit catching
system, drive system. The harvester is ease to operate
in the plant spacing used. With the harvester was obtained
a yield of 129,5 kg / h, detaching 71,7% of the ripe
fruits, with 52,3% of green fruits in the harvested
mass, which is not acceptable quality for the Colombian
standards. Further research, evaluating different frequencies,
oscillatory density rods, eccentric mass vibrators,
speed, load and concentration of ripe fruit is required.
Keywords
Mechanized harvesting, coffee harvest, foliage vibrators,
coffee, harvesting.
Los
equipos utilizados en la cosecha de frutales, mecanizada
y semi-mecanizada, por vibración, se pueden dividir
en: vibradores de ramas, vibradores de tronco y vibradores
de follaje. Con el fin de desarrollar equipos para la
cosecha del café se han estudiado a nivel teórico
y experimental las propiedades físico-mecánicas
de los frutos y las ramas y del sistema fruto-pedúnculo
(Adrian y Fridley, 1965; Wang (parte A y B), 1965; Wang
y Shellenberger, 1965; Monroe y Wang, 1968; Yung and
Wang, 1969; Shellenberger et al., 1969; Martínez
et al., 1988 y 1989; Crisosto y Nagao, 1991; Alvarez,
1990 ; Ciro, 1997 y Álvarez,1998).
Los vibradores de tronco son utilizados comercialmente
para el desprendimiento de aceitunas (Ortiz y Gil, 1986),
nueces, ciruelas, cerezas, manzanas y cítricos
(Pellenc et al., 1983 y Srivastava et al., 1993). Para
Srisvastava et al., (1993), los árboles que concentran
su producción en zonas con mucho follaje requieren
de la transferencia de relativa alta energía,
cuya aplicación se logra suministrando vibraciones
a las ramas o al tallo en sitios adecuados, con características
propias para cada cultivo.
De
acuerdo con Ortiz y Hernanz (1989), los vibradores de
tronco son más rápidos y más fáciles
de operar que los vibradores de ramas, por la facilidad
de acceso para el mecanismo sujetador del vibrador.
Sin embargo, cuando los árboles son grandes o
cuando abundan las ramas pendulares, los vibradores
de tronco no son los más adecuados debido a que
la vibración no se transmite debidamente a los
frutos, resultando en un bajo desprendimiento de frutos.
Aristizábal
(1998), en CENICAFÉ, siguió el procedimiento
referenciado por Martínez et al. (1988) para
el diseño de los vibradores multidireccionales
y construyó un modelo experimental que generó
vibraciones de cuatro lazos a una frecuencia de 50 Hz
y amplitud de 2,85 mm. El dispositivo se acopló
a 50% de la altura del árbol, los árboles
se vibraron durante 20s, obteniendo desprendimiento
de 47,8% de frutos maduros y 24,7% de frutos verdes,
con un contenido de frutos verdes en la masa cosechada
de 8% y un rendimiento de 141,1 kg de café en
cereza/hora.
Aristizábal
(1998) también diseñó y construyó
un modelo experimental para aplicar vibraciones circulares
al tallo de árboles de café, variedad
Colombia, obteniendo desprendimiento promedio de frutos
maduros de 63% y rendimiento en el rango 50 a 118 kg
de café en cereza/hora, dependiendo de la cantidad
inicial de frutos maduros presentes en el árbol.
La
técnica de aplicar vibraciones al follaje para
la cosecha mecanizada de diferentes cultivos ha sido
investigada en varios países. Actualmente en
el mundo los sistemas completamente mecanizados para
la recolección del café utilizan el principio
de vibración al follaje para el desprendimiento
de los frutos, lo recogen, lo limpian y lo ensacan en
una sola operación (Honda et al.,1979; Jacquet,
1998; Watson et al., 1979 ; Kashima, 1985).
Para
el caso de Brasil, con el uso de las cosechadoras autopropulsadas
JACTO se lograron disminuir en un 50% los costos de
la cosecha y reemplazar hasta 80 hombres en las mejores
condiciones de trabajo en el campo (Sartori et al.,1983;
Kashima, 1985; y. Ometto,1987).
Studer
(1968), citado por Wong (1995), patentó un agitador
de varillas cortas y rígidas y su diseño
fue incorporado posteriormente a las cosechadoras de
uva y tomates.
Tuck y Brown (1974) derivaron una ecuación para
calcular el torque generado por un agitador rotatorio
tipo inercial y concluyeron que su valor depende de
las masas excéntricas y de la inercia del agitador
de varillas. Su análisis está enfocado
más al diseño de los agitadores de inercia
que a la evaluación de los mismos.
Wong (1995) fue el primero en proponer un modelo dinámico
de un agitador de varillas tipo inercial para la cosecha
de café. A pesar de que sus análisis son
de indudable valor, el propio autor concluye que sus
resultados no permiten que sean usados para el diseño
de cosechadores.
Debido
a las características de los árboles de
café, la presencia de frutos en diferentes estados
de desarrollo, la baja selectividad, los estrictos estándares
de calidad exigidos, las altas densidades de las plantaciones
y las pendientes de los terrenos, los equipos para cosechar
café aplicando vibraciones al follaje no son
viables para la caficultura colombiana.
La
topografía de las zonas cafeteras colombianas,
la alta distribución de la cosecha, el crecimiento
y maduración del fruto, la arquitectura de la
planta (Arcila, 1990), las características de
crecimiento de la misma, la densidad de siembra, los
sistemas de manejo del cultivo, las lluvias durante
los ciclos de cosecha y el tamaño de las fincas
son los aspectos más importantes a tener en cuenta,
no solamente en el diseño de los equipos sino
también en su evaluación.
La
falta de poda hace que el leño productivo se
transforme en leño permanente aumentando el tamaño
del esqueleto del cafeto; esto conlleva a cosechas irregulares
porque la zona de producción se reduce y aumenta
el autosombreamiento (Federación Nacional de
Cafeteros de Colombia, 1979).
En
esta investigación se diseñó, construyó
y evaluó un equipo para la cosecha mecanizada
del café, con especificaciones técnicas
adecuadas para utilizarlo en cafetales con distancia
entre surcos de 2,0 m y en terrenos con pendiente de
hasta 30%. La información obtenida será
de gran utilidad para futuras investigaciones en Colombia
sobre la cosecha mecanizada.
1. MATERIALES Y MÉTODOS
Localización
El
cosechador de café por vibración del follaje,
denominado COVAUTO (COsechador Vibrador AUTO propulsado),
se construyó en el taller de Ingeniería
Agrícola de CENICAFÉ. La instalación
de sensores e instrumentación telemétrica
para el manejo de los datos se realizó en el
beneficiadero experimental de la disciplina. Las pruebas
de calibración y ajuste y las pruebas preliminares
de campo se efectuaron en un lote ubicado en la Granja
y en el lote La Guamera en la Estación Central
Naranjal de CENICAFÉ ubicados en el municipio
de Chinchiná (Caldas), respectivamente.
Materiales
y equipos
Los
materiales y equipos empleados en esta investigación
se utilizaron para la construcción de los diferentes
sistemas que componen el COVAUTO, la instrumentación
electrónica, el sistema telemétrico de
adquisición de datos y las fuentes de potencias
seleccionadas para remolcarlo en los lotes.
Metodología
Esta
investigación se desarrolló en tres etapas.
En la primera etapa se diseñó y construyó
la estructura, tipo pórtico, con los equipos
e instrumentos requeridos para generar vibraciones y
medir las vibraciones en diferentes partes de los agitadores
y deformaciones en la estructura en sitios críticos.
En la segunda etapa se obtuvo información del
equipo, sin emplear árboles de café, para
verificar su funcionamiento y hacer los ajustes requeridos.
También se midió la fuerza requerida para
transportarlo, la distribución de las cargas
en cada una de las cuatro ruedas del equipo y las coordenadas
del centro de gravedad. En la tercera etapa se recolectó
café con el equipo en árboles de segunda
cosecha, sembrados a 2,0 m x 0,7 m, un tallo por sitio,
en terreno plano.
Etapa
1.
Diseño, construcción y ensamble del prototipo
experimental COVAUTO
El
diseño se realizó utilizando el método
del factor de seguridad (Shigley y Mischke, 1990 y Srivastava
et al., 1993) y el programa Mechanical Desktop 2.0 y
la construcción y ensamble siguiendo las normas
de seguridad o de diseño establecidas por la
ASABE (American Society of Agricultural and Biological
Systems Engineers).
Sistema
estructural. Un marco tipo cercha y forma rectangular,
fabricado con ángulos de hierro de 5,08 cm (2,0
pulgadas), atiesados en las partes superior y media;
ángulos de 3,81 cm (1 ½ pulgadas) que
soportan

Figura
1. Prototipo COVAUTO para cosechar café aplicando
vibración al follaje,Construido en CENICAFÉ
el
peso de todos los componentes y tubos de acero Schedule
40 como base para las ruedas y futuro sistema de dirección
hidráulica (Figura 1). La estructura tiene 2
m de ancho, por 2 m de alto y 3 m de largo.
Sistema
de potencia. Motor Diesel Perkins de 29,9 kW (40 HP)
de potencia y 235 kg de peso, situado en la parte posterior
izquierda (mirado de frente) y con un despeje de un
metro con respecto al suelo.
Sistema
de combustible. Compuesto por la bomba de alimentación
de combustible adjunta al motor y un tanque de combustible
de 209 L (55 galones), de forma rectangular y ubicado
en la parte posterior izquierda y superior de la estructura
(mirado de frente).
Sistema
hidráulico. En la Figura 2 se presenta el diseño
del sistema hidráulico instalado en el COVAUTO,
incluyendo los sensores correspondientes con todos sus
elementos.
Conjunto de vibradores. Cada uno consta de un eje principal
de acero de 6,35 cm (2,5”) de diámetro
y dos ejes secundarios de acero de 5,08 cm (2”)
de diámetro, unidos a dos placas, también
de acero, de 6,35 mm (¼”) de espesor, que
integran un sistema de transmisión por piñones
(60B27 con manzana para bufin) y cadena ANSI #60 (paso
19,05 mm ó ¾”), que transmiten el
movimiento a un par de masas excéntricas de peso
variable (2 a 10 kg) y que proporcionan el movimiento
vibratorio deseado. En cada uno de los ejes está
acoplado un motor hidráulico, responsable de
suministrar potencia al sistema.
Porta-varillas
oscilatorias. Tubos de acero de 10,16 cm (4,0”)
de diámetro, concéntricos con los ejes
principales, y unido al conjunto vibrador por medio
de bridas de teflón, que tienen movimiento circular
independiente de los ejes principales, gracias a los
rodamientos rígidos de bolas situados en los
extremos (Figura 3).
Varillas
oscilatorias. De 40 cm de longitud y 0,95 cm (3/8”)
de diámetro, montados a lo largo de los tubos
porta- varillas sobre anillos de teflón (inicialmente
20 varillas por cada anillo y entre 9 y 20 anillos por
tubo); en un comienzo se realizaron ensayos con macana
(Wettinia kalbreyeri). Se ubicaron sensores en algunos
de ellos para analizar las fuerzas de impacto y de desprendimiento
de granos.
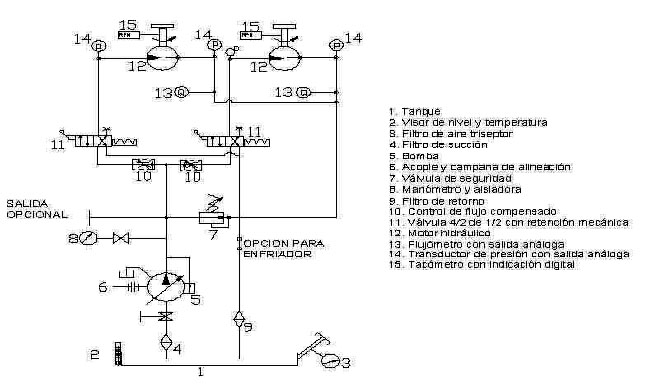
Figura
2. Circuito hidráulico diseñado para el
COVAUTO
21
placas fabricadas en PVC, situadas en la parte inferior
del vehículo, cuyo objetivo es capturar los frutos
que caen, a medida que el COVAUTO pasa por el surco,
y descargarlos a unas bandejas situadas a ambos lados
de éste (Figura 3).

Figura
3. Detalles de las varillas oscilatorias y del sistema
de captura de frutos desprendidos.
Sistema de enganche. Por tratarse inicialmente de una

(a )
Figura
4. COVAUTO en posición de transporte (a) y conjunto
tractor-COVAUTO en posición de trabajo (b)
máquina de tiro, el COVAUTO se diseñó
para ser remolcado desde un solo punto, mediante una
barra de tiro construida de eje cuadrado calibrado de
38,1 mm (1 ½”) de lado y de 2 metros de
longitud. En la Figura 4(a) se observa el sistema de
enganche en posición de transporte y en la Figura
4(b) en posición de trabajo. En esta última
posición el COVAUTO posee dos varillas guías
delanteras para levantar las ramas bajas del árbol
y conducirlas por encima de las placas hacia el sistema
de varillas oscilantes.
Tractor agrícola. La potencia para remolcar el
COVAUTO en la Granja (CENICAFÉ) y en cafetales
en la Estación Central Naranjal fue suministrada
por dos tractores, de doble transmisión, de 15,7
kW (21 HP) y 22,4 kW (30 hp), respectivamente.
Instrumentación electrónica
del COVAUTO
Los
sensores y los instrumentos de medición y control
fueron seleccionados teniendo en cuenta los principales
parámetros a evaluar: fuerza de tiro requerida
por el COVAUTO, frecuencia de los agitadores, amplitud
de oscilación de los dientes y potencia requerida
para la operación del sistema vibrador.
En
la selección de la instrumentación telemétrica
se tuvieron en cuenta las evaluaciones que se hicieron
en el campo, específicamente en la Estación
Central Naranjal, situada a 12 km del laboratorio de
cosecha mecánica de la Disciplina de Ingeniería
Agrícola de Cenicafé.

Figura
4. COVAUTO en posición de transporte (a) y conjunto
tractor-COVAUTO en posición de trabajo (b)
Celda de carga. Con rango de 0 a 138,9 N y resolución
de 1 N, para medir la fuerza de tiro requerida por el
COVAUTO, tanto en posición de transporte como
en posición de trabajo, instalada entre la barra
de tiro del tractor y la barra de enganche del COVAUTO.
Acelerómetros.
Se utilizaron acelerómetros referencia ADXL 190,
con rango de ± 100 g y resolución de 40
mg, producidos por la empresa Analog Devices.
Control
de flujo compensado. Referencia PCM 800, de pistón
diferencial, caudales máximo y mínimo
de 57 y 5,7 LPM, caída de presión de 1,03
MPa.
Transductor
de presión. Referencia K17M0242 HM, rango 0-26,7
MPa, Exactitud y coeficiente térmico 1% ±
0.04%.
Transductor
de flujo. Referencia SN 64407-KB, Rango de medición
0-182,4 LPM.
Indicador
de RPM. Rango de medición 5-100000 RPM, precisión
± 1 RPM.
Extensómetros eléctricos. Se instalaron
16 deformímetros (strain gauge) en la estructura
en pórtico del COVAUTO con el fin de medir los
esfuerzos que se generan en condiciones de campo en
los puntos considerados críticos. Se hicieron
medidas bajo condiciones estáticas y en campo.
Interfaz
mecánica de los Acelerómetros. Los acelerómetros
se colocaron en puntos estratégicos de las varillas
oscilantes del cepillo. La señal eléctrica
desde el acelerómetro se transmitió mediante
un acople mecánico de escobillas sin pérdidas,
gracias a un filtro pasabajos, el cual actuó
como un circuito de muestreo y retención. En
total se contó con ocho dispositivos de escobillas;
seis para los sensores y dos para la aplicación
del potencial de polarización al acelerómetro.
Unidad
Inteligente de proceso (UIP). Constituida por un microcomputador
basado en un microcontrolador de la familia PIC. Realiza
las operaciones de adquisición, digitalización
y transmisión. El formato final de las señales
fue 0 – 5 voltios. Las salidas se llevaron a través
de un multiplexador hasta el conversor análogo/digital.
Radio.
La transmisión se obtuvo mediante un radio
Motorola
de 2 W, en el rango de frecuencias de 470 a 500 MHz.
Receptor. La señal transmitida se recuperó
mediante una antena yagi de 10 decibeles de ganancia
y conducida al radio receptor, también Motorola.
Software
de adquisición. La adquisición, visualización,
procesamiento, registro y segunda transmisión
era ordenada por un programa en ambiente Windows (LAB-VIEW).
Otros elementos. La unidad telemétrica operó
con batería recargable de 12 voltios y 40 amperios,
dotada con cargador automático.
Etapa
2. Puesta a punto del sistema telemétrico y el
conjunto tractor - COVAUTO
Se
verificó el funcionamiento del equipo y se comparó
con el previsto en el diseño, sin cafetos, en
cuanto al rango de operación del sistema, esto
es: rango de frecuencia de los agitadores (8,3 a 16,7
Hz), rango de velocidad de desplazamiento (0,5 a 2 km/h),
amplitud de oscilación de los dientes para las
diferentes masas definidas en el diseño y para
tres materiales de los dientes (2 y 12 cm), potencia
requerida en el rango de operación del sistema
vibrador (hasta 3 kW/ vibrador) y la potencia requerida
en la barra de tiro del COVAUTO para el rango de velocidad
obtenido con el desplazamiento del conjunto ( 2,2 –
7,5 kW).
En la Tabla 2 se presentan las características
técnicas medidas y evaluadas en el COVAUTO
Tabla
2. Características técnicas del prototipo
experimental (COVAUTO)
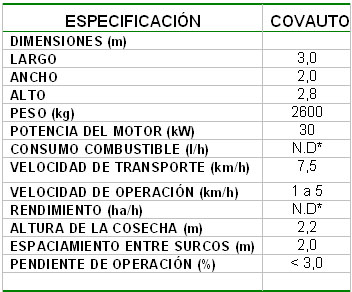 : :
* No disponible.
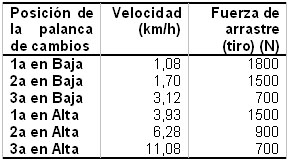
En la Tabla 3 se presenta el rango de velocidad del
conjunto tractor (Kubota) - COVAUTO en posición
de trabajo sin carga (evaluación sin cafetos),
que varió entre 1,08 y 11,08 km/h. Asímismo,
se presentan los valores de tiro para remolcar el COVAUTO
en diferentes marchas del tractor Kubota, en terreno
plano cubierto con césped. De acuerdo con los
valores, el tiro máximo promedio fue de 1800
N, valor que se considera normal para este tipo de equipos.
Tabla
3. Velocidad y fuerza promedio de arrastre (tiro) promedio
para el COVAUTO en posición de trabajo sin carga,
en terreno plano.
Ensayos
preliminares con el COVAUTO
Deformaciones
en la estructura del COVAUTO. Fueron ubicadas seis galgas
o extensómetros eléctricos en puntos considerados
críticos en la estructura en pórtico del
COVAUTO. Utilizando el sistema telemétrico para
las pruebas de campo se obtuvieron las máximas
deformaciones medidas para las galgas cuando el COVAUTO
se desplazó en condiciones de transporte y trabajo,
en el lote situado en La Granja, durante 15 minutos
de operación. Los valores máximos fueron
55 mm y 62 mm, considerados bajos para este tipo de
estructura y para esta prueba específica.
Aceleración
en las varillas oscilantes. Condiciones de operación
del COVAUTO:
-
Velocidad de desplazamiento : 1 km / h
- Frecuencia de los agitadores : 13,3 Hz
- Peso de las masas excéntricas en el conjunto
vibrador: 4 kg
- Anillos con dedos de macana en el agitador 1 : 5 (tercio
superior)
- Anillos con dedos de plástico (prolón)
en el agitador 1 : 1
- Anillos con dedos de macana en el agitador 2 : 6 (tercio
superior )
- Anillos con dedos de plástico en el agitador
2 : 1.
En
el agitador 1 se ubicaron dos acelerómetros (ADXL150
de ANALOG DEVICES), uno con rango ±100g en el
extremo de una de las varillas oscilantes, a una altura
del suelo de 1,49 m y el otro con rango ±50g
en una varilla de plástico a 1,16 m de la superficie
del suelo.
En
el agitador 2 se ubicaron tres acelerómetros
de las mismas características, el primero con
rango de ±50g en la mitad de una varilla de macana
a 1,41m de la superficie del suelo, el segundo con rango
de ±100g en otra varilla de macana a 1,41 m de
la superficie del suelo y el tercero con rango de ±50
en el extremo de una varilla de plástico (prolón)
a 1,21 m de la misma superficie.
Utilizando
el sistema de adquisición con telemetría,
se registraron los valores pico medio de las aceleraciones
tangenciales y los espectros de magnitud para la aceleración
o espectro de las señales.
Para
el agitador 1, la varilla de macana en su extremo registró
una aceleración tangencial de 22 g, mientras
en el extremo de la varilla de plástico se registró
una aceleración tangencial de 24 g. Los espectros
de magnitud para ambas varillas a la frecuencia de 13,3
Hz (798 cpm) fueron de 11,8g para la varilla de macana
y de 17 g para la varilla de plástico (prolón).
Como se pudo constatar visualmente y como lo indica
el resultado anterior, la varilla de plástico
presentó un comportamiento muy flexible para
impactar el follaje del árbol.
Para
el agitador 2, los resultados muestran:
Aceleración
tangencial en el extremo de la varilla de macana : 15
g
Aceleración tangencial en el extremo de la varilla
plástica : 22 g
Aceleración tangencial en la mitad de la varilla
de macana : 9 g
Los espectros de magnitud para las varillas de macana
en la frecuencia de excitación de 13,3 Hz (798
cpm) son de 10 g en el extremo de la varilla y de 7g
en la mitad de la varilla. La varilla de plástico
en su extremo y a la frecuencia de 13,12 Hz (787 cpm)
presenta una aceleración de 17,5 g, valor que
indica que es muy frágil para ser considerada
como un material promisorio en la aplicación
de vibraciones en el follaje del árbol de café.
Aceleración en el árbol. Con el fin de
obtener información sobre la respuesta del árbol
a las aceleraciones impuestas a las ramas por los dedos
o varillas del COVAUTO, conforme con las condiciones
de operación indicadas en el numeral anterior,
cuando el conjunto tractor-prototipo experimental se
desplazó sobre un surco en el lote de La Granja,
fue escogido un árbol al azar (altura 2,15 m),
al que se le ubicaron acelerómetros biaxiales
y uniaxiales, tal como se indica en las Figuras 5a y
5b.
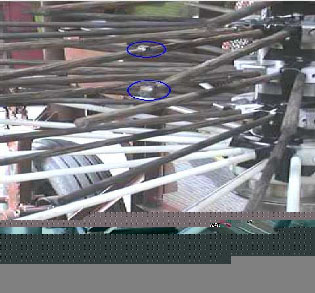
Figura 5a
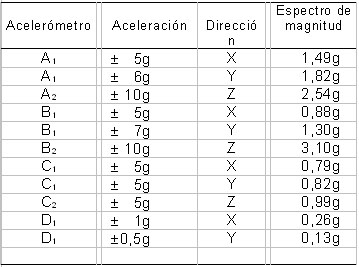
TABLA
5. Aceleraciones en ramas de café impactadas
por las varillas oscilatorias del COVAUTO.
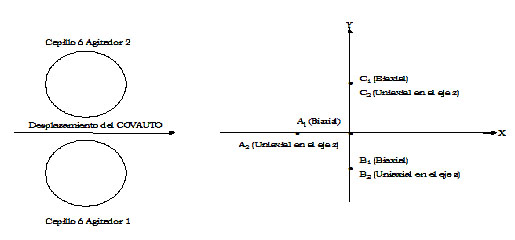
Figura
5b. Esquema de vista en planta de los agitadores y el
árbol. Ubicación de los acelerómetros
A1, A2, B1, B2,C1,C2.
.
Los acelerómetros A1 y A2 fueron ubicados a 14
cm del tronco y a 1,51 m de la superficie del terreno.
. Los acelerómetros B1 y B2 fueron ubicados a
21 cm del tronco y a 1,5 m de la superficie del terreno.
. Los acelerómetros C1 y C2 se ubicaron a 31
cm del tronco y a 1,61 m del suelo.
. El acelerómetro biaxial D fue ubicado en el
tronco y a 30 cm de la superficie del suelo.
Los
valores de las aceleraciones, sus direcciones y espectros
de magnitud se indican en la Tabla 5.
El análisis de los espectros de magnitud indica
que el valor de la frecuencia medida en las ramas donde
se ubicaron los acelerómetros es igual al registrado
en los puntos de las varillas donde se ubicaron los
acelerómetros. En general, la frecuencia es la
misma en los sitios de medición.
Con
relación a la aceleración, las ramas registraron
valores muy inferiores a los observados en las varillas
oscilantes del COVAUTO. Mientras que en el extremo de
las varillas de macana del cepillo 1 se registró
una aceleración tangencial de 22 g, el acelerómetro
B1 (Tabla 5) ubicado en su línea de acción
respondía con (52 + 72)1/2 = 8,6g. En el caso
del acelerómetro C1 ,ubicado en la línea
del cepillo ó agitador 2, la disminución
en la aceleración, cuando se analiza la varilla
de macana, prácticamente se reduce a la mitad
(pasa de 15g a 7,1g). Una probable explicación
a esta disminución en la aceleración puede
ser, entre otras; el número de varillas que impactaron
la rama bajo las condiciones de operación de
estas pruebas. Para una velocidad de desplazamiento
de 1 km/h, el tiempo de contacto de los agitadores con
el árbol fue de 8s (se observa que en los 3 primeros
segundos la aceleración fue muy baja). Durante
este tiempo los agitadores rotaron 285,12o. Con anillos
de 20 varillas se tendrán aproximadamente impactando
la rama 14 varillas y con un “set” de 6
anillos estuvieron en contacto con el árbol 84
varillas, de las 120 que llevaba el agitador en este
ensayo.
Etapa
3. Ensayos en campo con el COVAUTO
Los
ensayos se realizaron en el lote La Guamera, Estación
Central Naranjal, ubicada en el municipio de Chinchiná
(Caldas), en tres surcos, de aproximadamente 100 m de
longitud cada uno, árboles de variedad Colombia,
plantillas de segunda cosecha, sembradas a 2,0 m x 0,70
m. Tres semanas antes de los ensayos se aplicó
Ethrel en concentración de 800 ppm. Los resultados
obtenidos se presentan en la Tabla 6.
Tabla
6. Desempeño en cosecha del prototipo COVAUTO
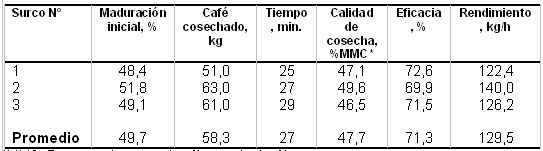
*MMC:
Frutos maduros en el café cosechado, %
A
partir de los resultados presentados en la Tabla 6 se
tiene que:
La
calidad del café cosechado no es aceptable para
los estándares colombianos. Este resultado refleja
la baja selectividad de la tecnología y el excesivo
tiempo de agitación del follaje de los árboles
con las varillas oscilantes, 3,7 min/árbol, notoriamente
superior al observado en la cosecha de café en
Brasil con equipo similares (2 s/árbol). Para
mejorar la calidad de recolección, al igual que
en los países que la utilizan, se debe emplear
la tecnología en árboles con alto porcentaje
de frutos maduros (mayor del 80%) con velocidad de avance
de 0,4 a 0,5 m/s, que permite tiempos de agitación
de 2 a 3 s/árbol, con menores tiempos cuando
la carga de frutos maduros sea baja, situación
que se presenta al inicio de la cosecha. La eficacia
lograda, aunque fue inferior a la mínima esperada
(más del 90%), es aceptable.
El rendimiento obtenido fue bajo. Depende de varios
factores, entre ellos la carga de frutos maduros (kg/árbol),
la eficacia de desprendimiento y la velocidad de avance
del equipo, que en promedio en las pruebas fue muy baja
(0,061 m/s), notoriamente inferior a la velocidad observada
en los equipos utilizados en la cosecha de café
en Brasil (0,4 a 0,6 m/s).
2.
CONCLUSIONES
1. Impactando el follaje de árboles de café
variedad Colombia, plantillas de 2a cosecha, con 49.7%
de frutos
maduros, a 900 cpm con velocidad de avance de 0,061
m/s y con masas desbalanceadas de 10 kg., se desprendió
el 71,3% de los frutos maduros presentes en el árbol
con alto porcentaje de frutos verdes en la masa cosecha
(52,3%) no aceptable para los estándares de Colombia.
2.
Cosechadores tipo pórtico, como el COVAUTO ó
de similares especificaciones, se pueden utilizar en
cafetales sembrados con distancia entre surcos de 2,0m,
con pendientes máximas transversal y longitudinal
de 47% y 58%, respectivamente.
3.
La frecuencia en las ramas del café es igual
a la de las varillas que las golpean.
4.
Las aceleraciones en las ramas son muy inferiores a
las medidas en las varillas oscilantes de macana (Wettinia
kalbreyeri).
5.
Para remolcar el COVAUTO en terreno plano a una velocidad
de 1,0 km/h se requiere una fuerza de 1.800 N.
3.
AGRADECIMIENTOS
Los
autores manifiestan sus agradecimientos a la Federación
Nacional de Cafeteros de Colombia, al Instituto Colombiano
para el Desarrollo de la Ciencia y la Tecnología
“Francisco José de Caldas” –
COLCIENCIAS, por su apoyo financiero; al personal técnico
de la Disciplina de Ingeniería Agrícola
del Centro Nacional de investigaciones de Café
- CENICAFÉ, por todos sus aportes y al personal
de Mecánicos y Auxiliares del Taller de Ingeniería
Agrícola del Centro Nacional de Investigaciones
de Café - CENICAFÉ, por su colaboración
en la construcción del prototipo experimental.
4.
REFERENCIAS BIBLIOGRÁFICAS
Adrian,
P. A. and Fridley, R. B. (1965). Dynamic design criteria
for inertia type shaker. Transactions of the ASAE
8(4):12-14.
Álvarez, M.F. (1990). Cosecha mecánica
de café en ladera. Experimento ING-101, Chinchiná,
CENICAFE. Disciplina de Ingeniería Agrícola.
65p. (Informe de año sabático Universidad
Nacional de Colombia Sede Medellín).
Álvarez,
T. E. (1998). Estudio de las propiedades físico-mecánicas
del sistema fruto-pedúnculo del café
variedad Colombia. Medellín, Universidad Nacional
de Colombia. Facultad de Ciencias Agropecuarias, 110p.
(Tesis: Ingeniera Agrícola).
Arcila,
P. J. (1990). Productividad potencial del cafeto en
Colombia. Centro Nacional de Investigaciones de Café.
Cenicafé. 50 años de CENICAFE. 1938-1988.
Conferencias conmemorativas Chinchiná, Cenicafé,
p. 105-119.
Aristizábal,
D. (1998). Estudio del efecto de la vibración
del árbol de café en la selectividad
de la cosecha. Chinchiná, Cenicafé,.
46p.
Ciro,
V. H. J. (1997). Estudio dinámico de la rama
de café para el desarrollo de la cosecha mecánica
por vibración. Medellín, Universidad
Nacional de Colombia. Facultad de Ciencias Agropecuarias,
98p. (Tesis: Ingeniero Agrícola).
Crisosto,
C.,H.; Nagao, A. (1991). Evaluation of fruit removal
force of coffe cultivars. HortScience 26(2): 210.
Federación
Nacional de Cafeteros de Colombia. FEDERECAFÉ
(1979). Manual del cafetero colombiano. 4.ed. Bogotá,
FEDERECAFÉ,. 209p.
Honda,
A. F., Fava, J. F.M., Sartori, S. y Bastos, M. V.
(1979). Efeito da colheita mecânica no cafeeiro.
7° Congresso Brasileiro de Pesquisas Cafeeiras.
IBC/GERCA.
Jacquet,
M. (1998). La récolte mécanique du café:
situation actuelle. Montpellier.
Kashima,
T. (1985). Colheita mecanizada do café: equipamentos,
desempenho e custo a nível de propriedade.
12° Congresso Brasileiro de Pesquisas Cafeeiras.
JACTO.
Martínez,
R. A., Vega T. R., Molina, M.E., Aguilar, G.
R.,
Morales, F. A. (1988). Reporte de investigaciones
sobre cosecha mecanizada de café. (Parte I).
La Habana. ISCAH,.p 3-89.
Martínez,
R. A., Morales, F.J., Gómez, A.D. y Aloysius,
H. N. (1989). Determinación de parámetros
de un órgano de trabajo para cosecha mecanizada
de café por vibración. Revista Ciencias
Técnicas Agropecuarias 2(3): 27-49.
Monroe,
G. E. and Wang, K.J. (1968). Systems for mechanically
harvesting coffee. Transactions of the ASAE 11(3):
270-278.
Ometto, D. A. (1987). A new Brazilian coffee harvester.
In: Simposio Internazionale sulla Meccanizzazione
Agrícola. Bologna, November, p. 55-58.
Ortiz,
C. J. y Gil S.J. (1986). Diseño de vibradores
de tronco para la recolección de aceituna.
Anales del Instituto Nacional de Investigaciones Agrarias
1(1): 65-84.
Ortiz,
C. J. y Hernanz, A. (1989). Técnica de la mecanización
agrária. 3.ed. Madrid, Ediciones Mundi-prensa,
641 p.
Pellenc,
R., Argenson, M., Bonicelli, B. and Sevilla, F. (1983).
Impulse shaking of tree fruit in France. In: International
Symposiom on Fruit, Nut and Vegetable Harvesting Mechanization.
Bet Dagam, october 5-12, Proceeding.p.97-102.
Sartori,
S., Bastos, M. V., Tango, A. H. and Fava J. F. M.
(1983).Derriçadora de café montada em
trator cafeeiro. 10° Congresso Brasileiro de Pesquisas
Cafeeiras. JACTO.
Shellenberger,
F. A., Myres, A. L. and Monroe,G.E. (1969).Hand-carried,
coffe-harvesting equipment. Transactions of the ASAE
12(6): 763-765.
Shigley,
J. E. y Mischke, C.R. (1990). Diseño en Ingeniería
Mecánica. 5 ed.(Cuarta edición en español).
McGraw – Hill, México, 883 p.
Srivastava
A. K., Goering E. C. and Rohrbach, R. P. (1993). Engineering
principles of agricultural machines. St. Joseph ,
ASAE,. 60 p.
Tuck,
C. R. and Brown, F.R. (1974). Dynamics of a torsional
type inertia shaker. Journal of agricultural Engineering
Research 19(3): 213-225.
Wang, K.J. (1965). Mechanical coffee harvesting (Part
A, B). Transactions of the ASAE 8(3): 400-405.
Wang,
K.J. and Shellenberger, F.A. (1965). Effects of cumulative
damage due to stress cycles on selective harvesting
of coffee. Transactions of the ASAE 10(2): 252-255.
Watson,
A.G., Scudder, R. and Marmo, P.A. (1979). Eficiencia
do derricadora e recolhedor de café pela colhedeira
mecánica nas variedades catuaí e mundo
novo no Estado de Sao Paulo. In: Congresso Brasileiro
de Pesquisas Caffeiras, 7 dezembro 4-7,1979. Resumos.
Rio de Janeiro,IBC- GERCA, p.7-10.
Wong,
C. K. (1995). Dynamics of a torsional type inertial
coffee harvester. Ohau , University of Hawaii, 66p.
( Thesis: Magister of Science).
Yung,
C. and Wang, K. J. (1969). Response of coffee laterals
to circular base motion. Transactions of the ASAE
12(5): 580-583.
|



